Réponse : Capteur de distance
Mesure de distance
-
La documentation utilisée est celle ci : https://randomnerdtutorials.com/esp8266-nodemcu-hc-sr04-ultrasonic-arduino/
-
Le schéma est le suivant :
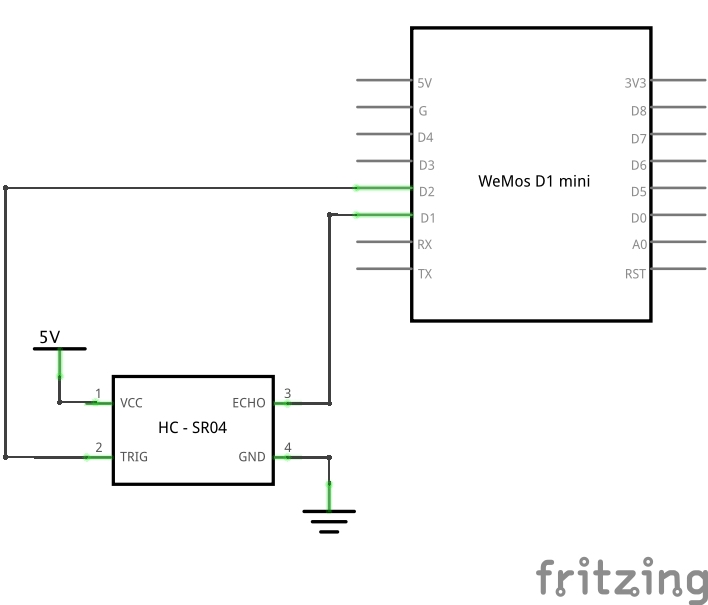
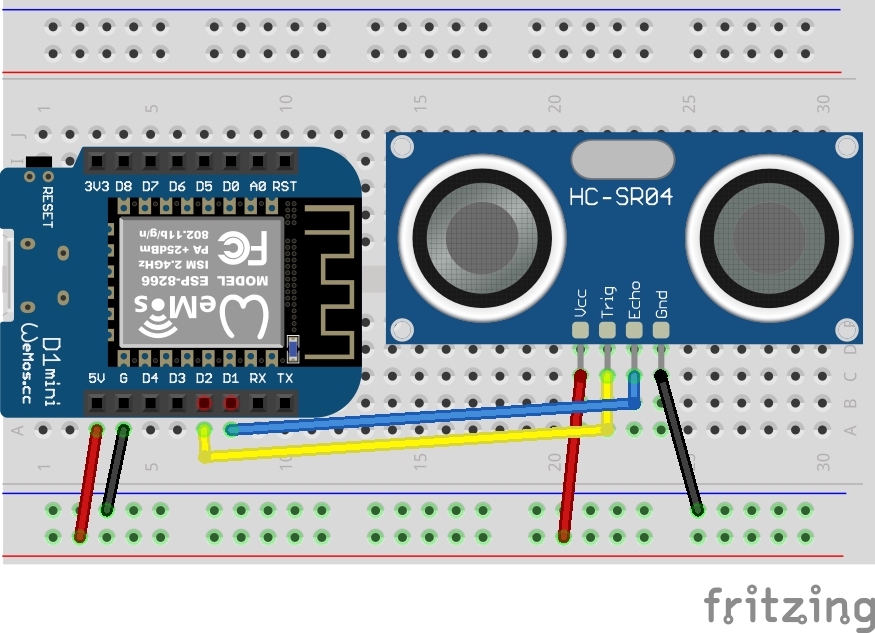
- Le montage correspondant est :
- Voici le code du sketch :
/*********
Rui Santos
Complete project details at https://RandomNerdTutorials.com/esp8266-nodemcu-hc-sr04-ultrasonic-arduino/
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files.
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
*********/
#define ECHO_PIN D1
#define TRIGGER_PIN D2
//define sound velocity in cm/uS
#define SOUND_VELOCITY 0.034
long duration;
float distance;
void setup() {
Serial.begin(115200); // Starts the serial communication
Serial.flush();
pinMode(TRIGGER_PIN, OUTPUT); // Sets the TRIGGER_PIN as an Output
pinMode(ECHO_PIN, INPUT); // Sets the ECHO_PIN as an Input
}
void loop() {
// Clears the TRIGGER_PIN
digitalWrite(TRIGGER_PIN, LOW);
delayMicroseconds(2);
// Sets the TRIGGER_PIN on HIGH state for 10 micro seconds
digitalWrite(TRIGGER_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIGGER_PIN, LOW);
// Reads the ECHO_PIN, returns the sound wave travel time in microseconds
duration = pulseIn(ECHO_PIN, HIGH);
// Calculate the distance
distance = duration * SOUND_VELOCITY/2;
// Prints the distance on the Serial Monitor
Serial.print("Distance (cm): ");
Serial.println(distance);
delay(500);
}
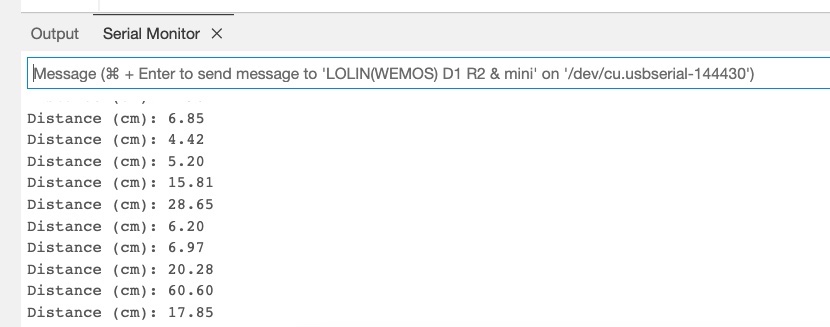
Ne pas oublier de changer la vitesse de communication en baud de la console série.
La sortie de console est alors :
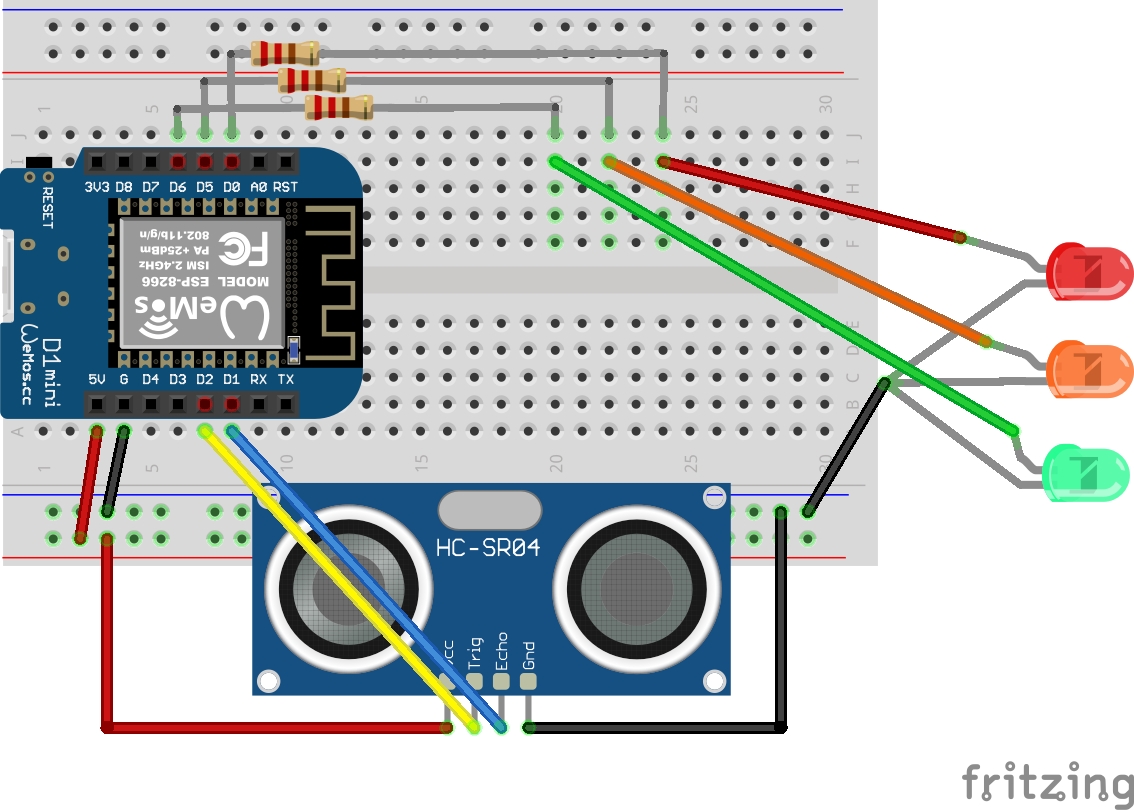
Indicateur de distance
- Le schéma est le suivant :
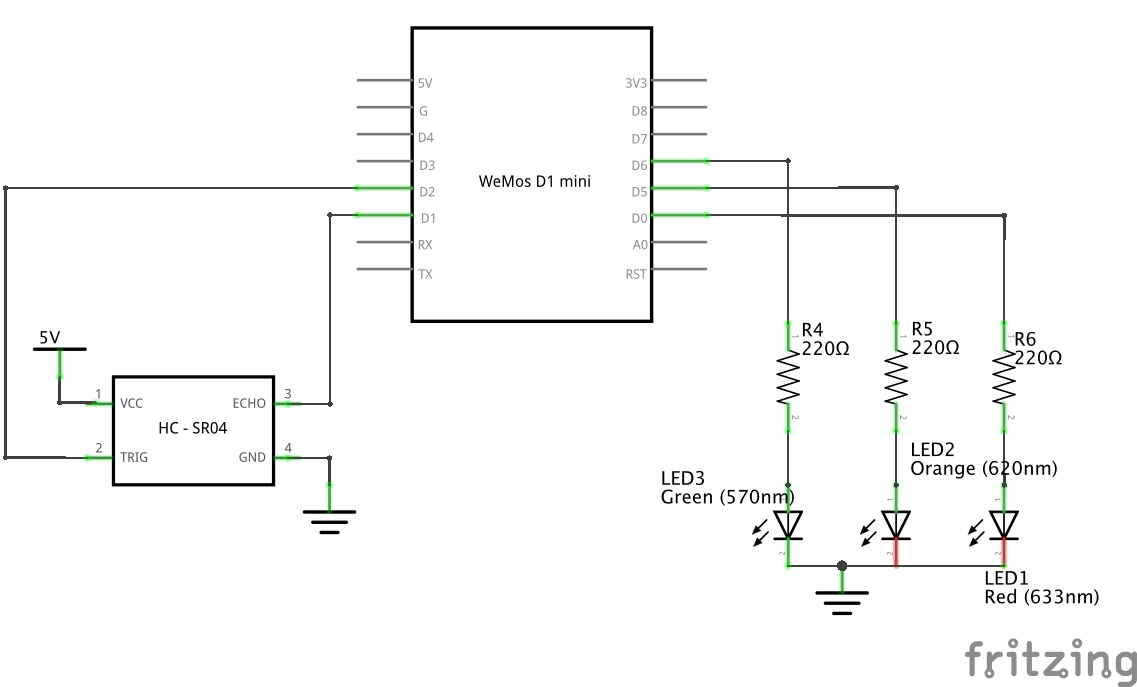
- Le montage correspondant est :
- Voici le code du sketch :
/*********
Rui Santos
Complete project details at https://RandomNerdTutorials.com/esp8266-nodemcu-hc-sr04-ultrasonic-arduino/
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files.
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
*********/
#define LED_RED D6
#define LED_ORANGE D5
#define LED_GREEN D0
#define ECHO_PIN D1
#define TRIGGER_PIN D2
//define sound velocity in cm/uS
#define SOUND_VELOCITY 0.034
long duration;
float distance;
void setup() {
Serial.begin(115200); // Starts the serial communication
Serial.flush();
pinMode(TRIGGER_PIN, OUTPUT); // Sets the TRIGGER_PIN as an Output
pinMode(ECHO_PIN, INPUT); // Sets the ECHO_PIN as an Input
pinMode(LED_GREEN, OUTPUT);
pinMode(LED_ORANGE, OUTPUT);
pinMode(LED_RED, OUTPUT);
}
void loop() {
// Clears the TRIGGER_PIN
digitalWrite(TRIGGER_PIN, LOW);
delayMicroseconds(2);
// Sets the TRIGGER_PIN on HIGH state for 10 micro seconds
digitalWrite(TRIGGER_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIGGER_PIN, LOW);
// Reads the ECHO_PIN, returns the sound wave travel time in microseconds
duration = pulseIn(ECHO_PIN, HIGH);
// Calculate the distance
distance = duration * SOUND_VELOCITY/2;
// Prints the distance on the Serial Monitor
Serial.print("Distance (cm): ");
Serial.println(distance);
if (distance >= 12) {
green();
} else if (distance < 12 && distance > 7) {
orange();
} else {
red();
}
delay(500);
}
void green() {
digitalWrite(LED_GREEN, HIGH);
digitalWrite(LED_ORANGE, LOW);
digitalWrite(LED_RED, LOW);
}
void orange() {
digitalWrite(LED_GREEN, LOW);
digitalWrite(LED_ORANGE, HIGH);
digitalWrite(LED_RED, LOW);
}
void red() {
digitalWrite(LED_GREEN, LOW);
digitalWrite(LED_ORANGE, LOW);
digitalWrite(LED_RED, HIGH);
}